다른 플래그쉽 모델들이 지문, 안면 인식과 홍채 인식 등을 동시에 사용할 수 있게 한다면, 애플은 안면 인식만 주구장창 밀고 있다. 진짜 지문 인식 좀 넣어줬으면 좋겠다.
타사 스마트폰엔 내장형 지문인식 다 채택하고 있는데, 얘네는 대체 왜 안 할까? 이러다 나중에 남들 다 하는 지문인식 뒤늦게 넣은 다음에 대단한 것 마냥 떠들지 않을까 싶은 게 벌써 보임.
애플은 최적화를 정말 잘하고, 그에 따라 칩 성능도 엄청 난 건 인정인데 자꾸 이상한 부분에서 이상한 짓들을 한다. 폭리를 취한다던가 환경을 생각해서 충전기는 뺐지만, 호환이 안 되는 충전기 때문에 버려지는 충전기, 아이패드 맥에는 충전기를 넣어주는 이상한 행동 등등...
아무튼 안면 인식의 대표주자인 애플의 페이스 ID를 살펴보자.
페이스 아이디를 구현하기 위해 아이폰 전면부에는 노치가 있다. 그리고 이 안에는 크게 적외선 카메라, 적외선 투광기, 근접센서, 조도 센서, 도트 프로젝터로 구성되어있다.

왜 애플이 페이스 아이디의 대표일까?
초기 안면 인식 기술은 애플을 제외한 대부분은 스마트폰의 셀프 카메라에 의존했다. 애플의 페이스 아이디가 나온 지 얼마 안 됐을 때 한 실험에서 3D 프린터로 인쇄한 사람 얼굴을 이용해 안면인식 잠금을 해제할 때 애플 외에는 모두 잠금 해제에 성공했었다.
그만큼 현재 애플의 안면 인식 기술은 앞서 간다고 할 수 있다. 지금도 마찬가지다. 그렇다면 애플이 어떤 방식으로 안면인식을 구현할까?

위 사진과 같이 도트로 조형도를 만들어 인식을 하는 것이다.
무슨 얘기냐 하면 적외선을 인식하면 전류 값이 변하는 적외선 센서를 모아 놓고, 각 센서를 스캔한 뒤 이미지 센서를 이용해 영상을 만드는 것이 적외선 카메라인데 이를 이용해 사람의 얼굴을 인식하는 것이다. 즉, 도트 프로젝터에서 적외선 도트를 발사해 얼굴 조형도를 그린다. 동시에 적외선 카메라로 다시 이미지를 촬영하여 얼굴을 읽어내는 방식이 페이스 ID의 원리다.
이때 적외선의 광도를 측정하여 부수적으로 도와주는 것이 조도센서다.
조도센서의 동작원리는 빛이 재료에 입사하게 되면 전자-정공쌍이 생성되고, 생성된 전자는 운반자 농도의 증가를 가져와서 내부의 저항이 줄어들게 하는 광전도 현상을 이용한 것이다.
즉, 주변이 밝으면 화면의 밝기도 밝아지고 어두우면 화면 역시 어두워진다. 조도센서가 빛이 부족하다고 판단되면 적외선 투광기가 적외선 조명을 비추어 얼굴을 인식하는데 문제가 없도록 도움을 준다.

앞서 설명한 것을 간단히 영상을 통해 확인해보면, '아 대충 이런 거군.' 할 것이다.
다음은 근접센서다. 근접센서는 사물과의 거리를 인식한다.

발광부에서 LED 적외선을 쏘면 근접한 물체 표면에서 반사되어 수광부를 통해 포토다이오드 쪽으로 적외선이 입사하게 되며, 이때 포토다이오드의 전기적 출력은 반사되어 온 빛의 세기에 비례하게 된다.
일정한 값 이상의 전기적 출력이 나오게 되면 물체가 근접했다고 판단하게 되는 원리다. 여기서 적외선을 사용하는 이유는 항상 태양과 같은 가시광선의 외부 광원이 포토다이오드 쪽으로 입사하고 있기 때문에 이와 같은 신호로 인한 오작동을 줄이기 위해 적외선을 사용하고 있다.
다음은 ToF 근접센서다. 최근의 많이 채택하고 있어서 익숙한 센서다.
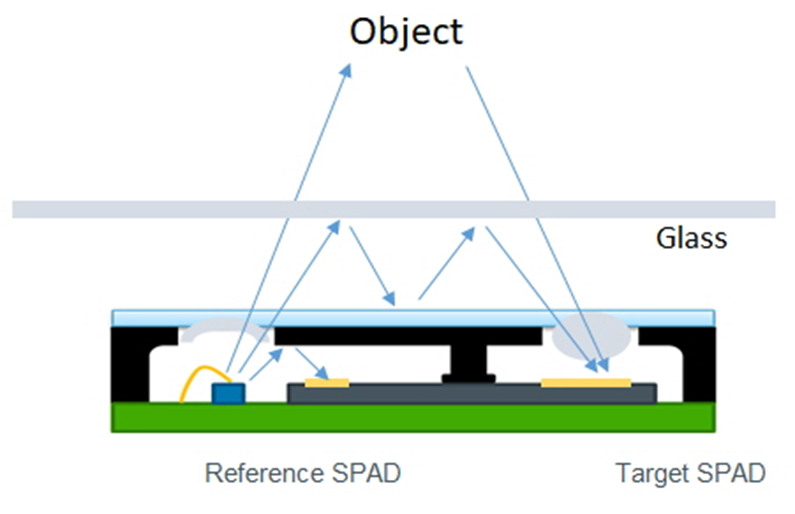
흔히 사용하는 근접센서의 경우 5~10cm 정도의 비교적 짧은 거리에 물체가 있는 것을 인식하는 용도로 사용되었는데, 반사되는 빛의 양을 측정하다 보니 물체의 종류나 매질 등 주변 환경에 따라 오차가 발생하는 것과 유효 거리가 짧아 제한적이라는 단점이 있었다.
ToF는 ‘Time of Flight’의 약자로 적외선 빛을 쏘아서 반사되는 시간을 측정하여 거리를 계산하는 방식으로 조금 더 먼 거리와 깊이감도 측정할 수 있다.
이 센서에 한 픽셀 안에는 in phase receptor와 out phase receptor가 있다.
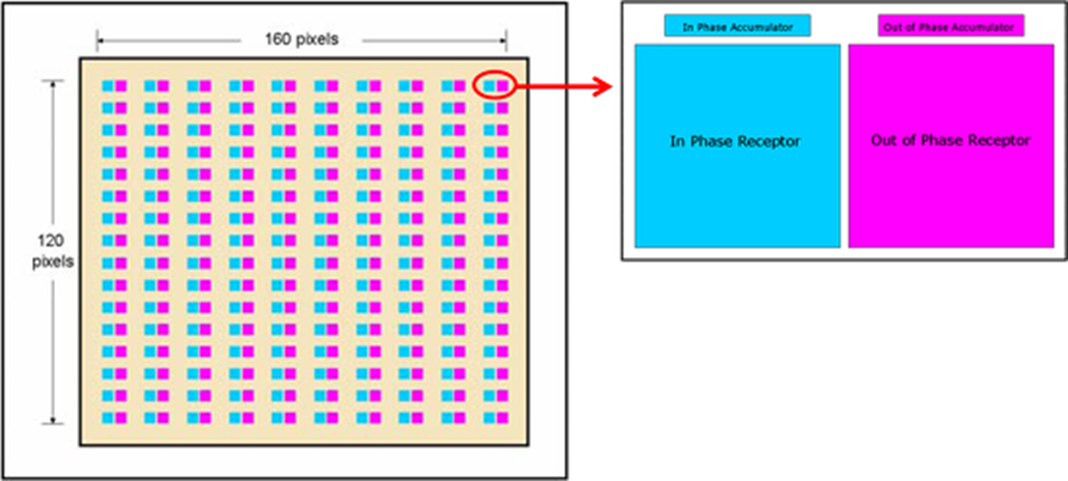
1) 그리고 적외선 LED가 켜져 있는 시간 동안 in phase receptor가 수신을 하며, 꺼져있는 시간 동안은 out phase receptor가 동작을 한다.

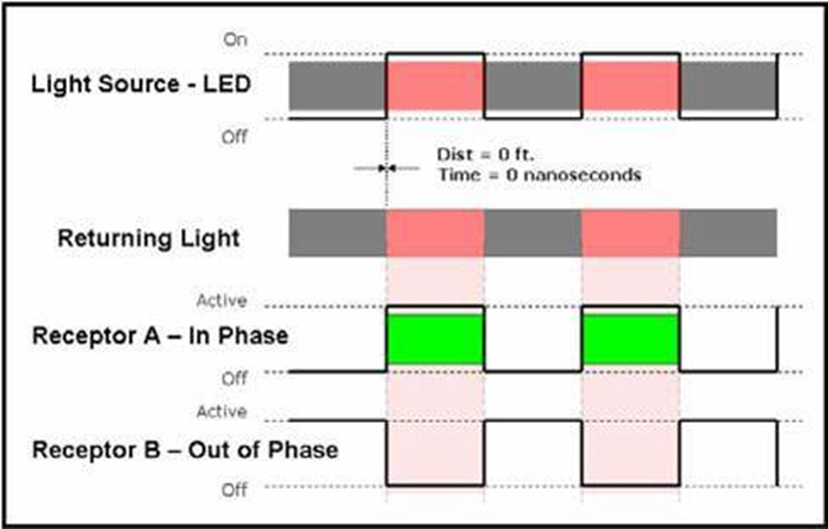
2) 이때 TOF 센서와의 거리가 0일 경우에 in phase receptor에만 반사된 빛이 수신되고, out phase receptor에는 빛이 전혀 수신할 수 없는 상태가 된다.
3) 그리고 사물과 TOF 센서가 어느 정도 거리가 있는 상태라면 빛이 사물에 부딪혀 돌아오는 시간이 생겨 in phase receptor가 동작하는 시간의 일정 부분은 빛을 수신하지 못하는 구간이 발생하며, 반대로 out phase receptor가 동작하는 시간의 일정 부분에는 떨어져 있는 거리를 갔다가 돌아오는 시간만큼의 빛을 수신할 수 있게 된다.
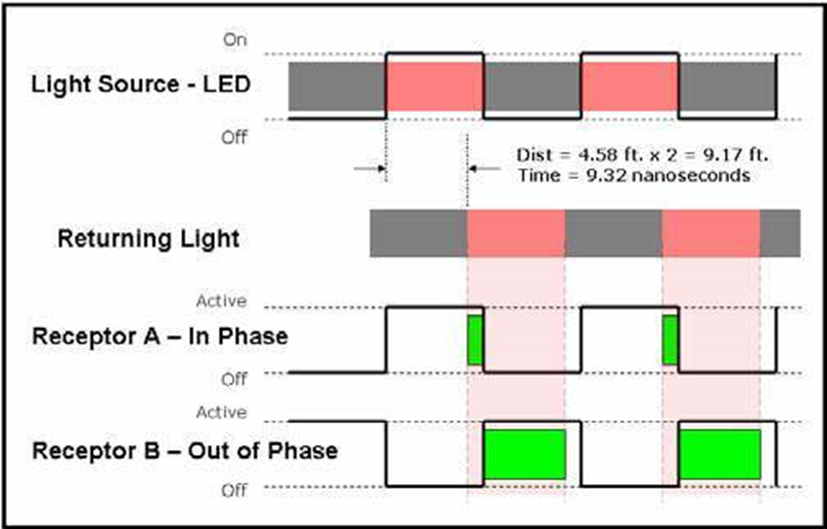
즉, 거리에 따라 in phase receptor와 out phase receptor의 빛을 수신하는 시간이 달라지고 이것으로 사물과의 거리를 측정하는 데 사용되는 센서이다. 이것을 통해서 가상으로 길이를 잰다던가, 무언가를 배치하는 시뮬레이션 수행이 가능하다.
'과학과 공학 이야기 > 반도체와 디스플레이' 카테고리의 다른 글
| 삼성디스플레이 에코스퀘어 정의와 원리 정리 (0) | 2021.10.15 |
|---|---|
| 심박수 센서와 심전도 센서의 원리 (2) | 2021.09.22 |
| 지문인식 센서의 종류와 원리. 광학식, 정전식, 초음파 센서의 차이 (0) | 2021.09.17 |
| 색 안정성을 높인 페로브스카이트 발광 소자 (2) | 2021.05.02 |
| 3차원 반도체로 가기 위한 2차원 반도체 (0) | 2021.04.27 |




댓글